Чи знаєте ви, що розробки технологій автономного водіння почалися ще півстоліття тому? У 1968 році був створений мобільний робот Shakey, який сприймав світ через вбудовану камеру. А перший автоматизований автомобіль зі сприйняттям навколишнього середовища був розроблений у 1977 році в лабораторії машинобудування Університету Цукуба.
Пройшло вже більше 50 років, і лише зараз можна говорити про реальні перспективи таких розробок. Прогрес безперечно є, але очевидно – цього недостатньо. Чому ж тоді технології автономного водіння розвиваються так повільно?
На днях пройшов цікавий вебінар «Autonomous Vehicles Online», який якраз і окреслив поточний стан галузі і ті виклики, що стоять перед компаніями-розробниками автономного транспорту. Своїми знаннями та досвідом ділилися представники Volvo Car Corporation, General Motors Research, Geely, Daimler Trucks, Ford Motor Company, LeddarTech, Ansys.
Тож повертаючись до питання щодо недостатньої швидкості розробок безпілотних автомобілів – наразі існує три комплексні проблеми, які потребують вирішення.
Власне, каменем спотикання залишається завдання навчити автомобіль правильно сприймати навколишній світ. І тут криється кілька підводних каменів.
ТРИ ТИПИ «ОЧЕЙ» ДЛЯ АВТОНОМНОГО АВТОМОБІЛЯ
Автономним автомобілям потрібні спеціальні сенсори, такі як камери, радар чи лідар, щоб «бачити» навколишній світ.
Камери дешеві та надійні, їх можна використовувати для огляду на 360 градусів. Але, як і наші очі, камери можуть погано бачити вночі або у поганих погодних умовах. Що важливо – вони також не дають точної інформації про відстань. Хоча комп’ютери можуть вирішити цю проблему за рахунок обчислень на базі тих даних, що дають камери, - це може зайняти деякий час, а тому не може бути надійним способом для безпілотного водіння.
Щоб обійти цей недолік, можна використовувати радар – високоточний спосіб вимірювання відстані та швидкості руху твердих об’єктів, таких як автомобілі. Його сенсори дешеві, надійні і вже мають вирішальне значення для таких систем, як автоматичний круїз-контроль та автономне екстрене гальмування. Радар добре працює вночі і надійний у більшості погодних умов. Але і у радара є свої недоліки – його сенсори мають обмежене поле зору, і їх роздільна здатність набагато нижча, ніж у камери.
Обидва недоліки можна усунути за допомогою лідара. Він працює подібно до радара, але використовує невидиме лазерне світло, а не радіохвилі. Лідар може скласти дуже детальну та надзвичайно точну карту навколишнього середовища для автомобіля, але на технологію сильно впливає погода. Крім того, такі сенсори дорогі і досить крихкі, хоча твердотільний лідар наступного покоління обіцяє це виправити.
ЯК НАВЧИТИ АВТОМОБІЛЬ «БАЧИТИ»?
Як бачимо, три основні технології сенсорів (камери, радар, лідар) мають свої сильні та слабкі сторони, і жодна з них не надає повних та надійних даних, необхідних для автономного керування.
Щоб виправити це, автономні автомобілі використовують кілька типів сенсорів, які розпізнають дані в режимі реального часу за допомогою потужних сучасних систем штучного інтелекту.
Сенсори розташовані так, що поля їхнього зору перекриваються, створюючи «зображення» однієї і тієї ж області за допомогою різних технік. Це дозволяє порівняти дані з кількох сенсорів, щоб виключити помилкові показники та отримати результат, що відповідає дійсності.
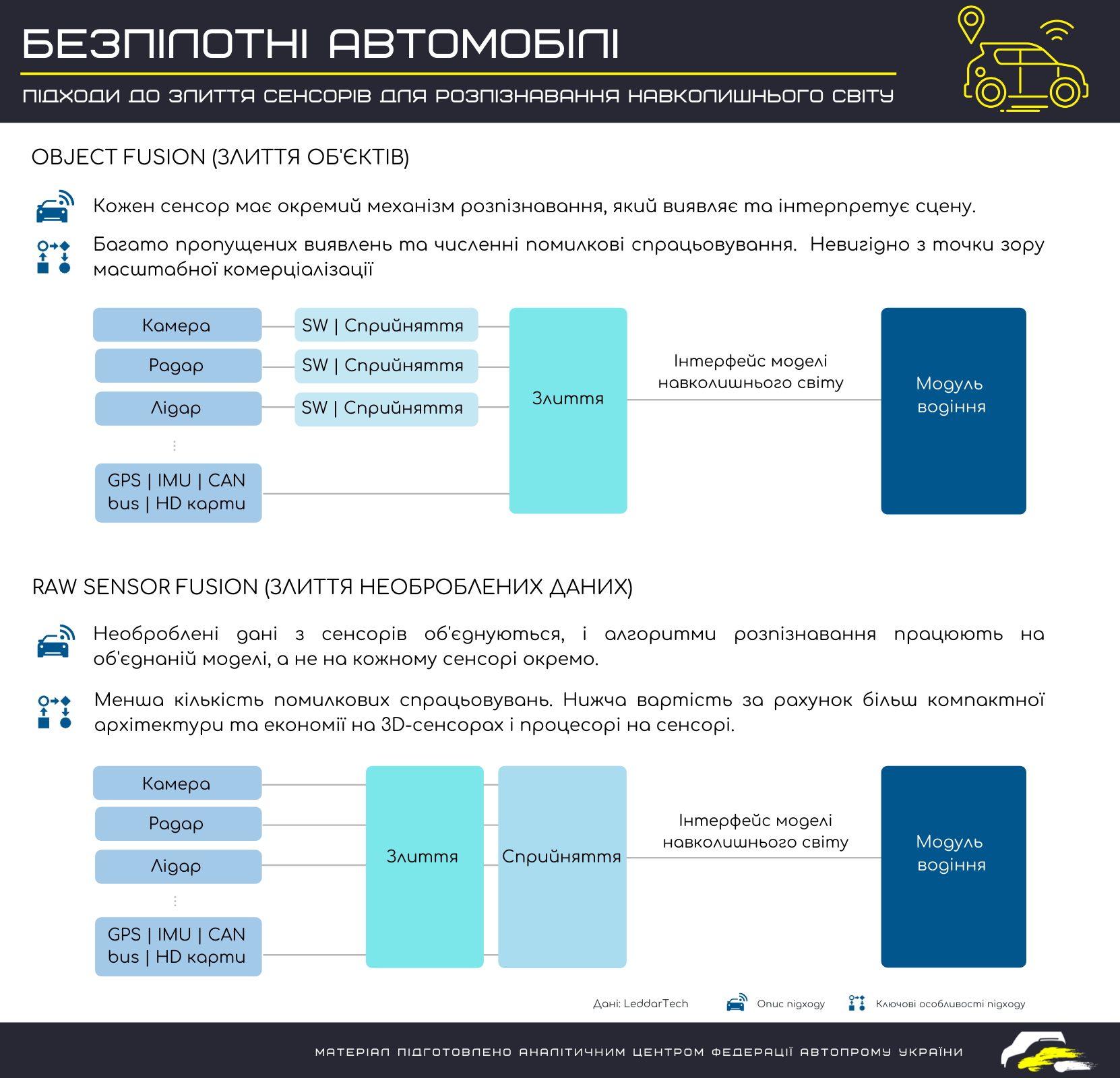
Але як досягти ефективного «злиття сенсорів» – синхронізації даних з усіх типів сенсорів?
У розробників є два основних підходи:
АВТОМОБІЛЬ ТЕЖ МОЖУТЬ «ХАКНУТИ»?
Усі ці дані, що генеруються автомобілями з технологіями автономного водіння, стають одночасно драйвером і стримуючим фактором для автомобільної промисловості. Вже сьогодні, за інформацією McKinsey, підключений до мережі автомобіль обробляє до 25Гб даних на годину. А далі буде тільки більше.
Іншими словами – автомобіль поступово стає дата-центром на колесах. І зрозуміло, що за таких умов важливу роль відіграє належний захист даних. З 2010 року було близько 700 повідомлень про автомобільні кібер-атаки (і це тільки оприлюднені дані). При цьому лише за минулий рік таких випадків стало у 4 рази більше порівняно з 2019 роком.
Величезне значення кібербезпеки та адекватного розпізнавання навколишнього середовища стає ще більш очевидним, враховуючи реальну загрозу маніпуляцій даними. Зокрема, так звані «суперечливі зображення» (adversarial images) змушують систему бачити не те, що є насправді. Навіть дрібні зміни зображення можуть привести до різних інтерпретацій ситуації. Наприклад, якщо наклеїти чорні смуги-стікери на знак «Стоп», система безпілотного водіння може сприйняти це як знак обмеження швидкості 45 км/год.
Ще один приклад – фантомні зображення (depthless objects), коли система бачить те, чого насправді немає. Дослідники виявили, що існуючі системи автопілотів можна обдурити, показавши їм зображення людей, автомобілів та інших перешкод, спроектовані дронами або іншими носіями проекторів, на дорозі або на навколишніх білбордах. Зловмисники могли б потенційно використати цю схему, щоб запустити систему гальмування або скерувати автомобіль на зустрічну смугу.
Як цьому завадити? Вдосконалювати алгоритми розпізнавання та розвивати машинне навчання. Саме тому автономні автомобілі тестуються на дорогах загального користування. Збираючи дані з реальних ситуацій водіння та навчаючи автомобіль правильно реагувати, розробники можуть створювати найефективніші алгоритми водіння та продовжувати тестувати і вдосконалювати їх у реальному світі.
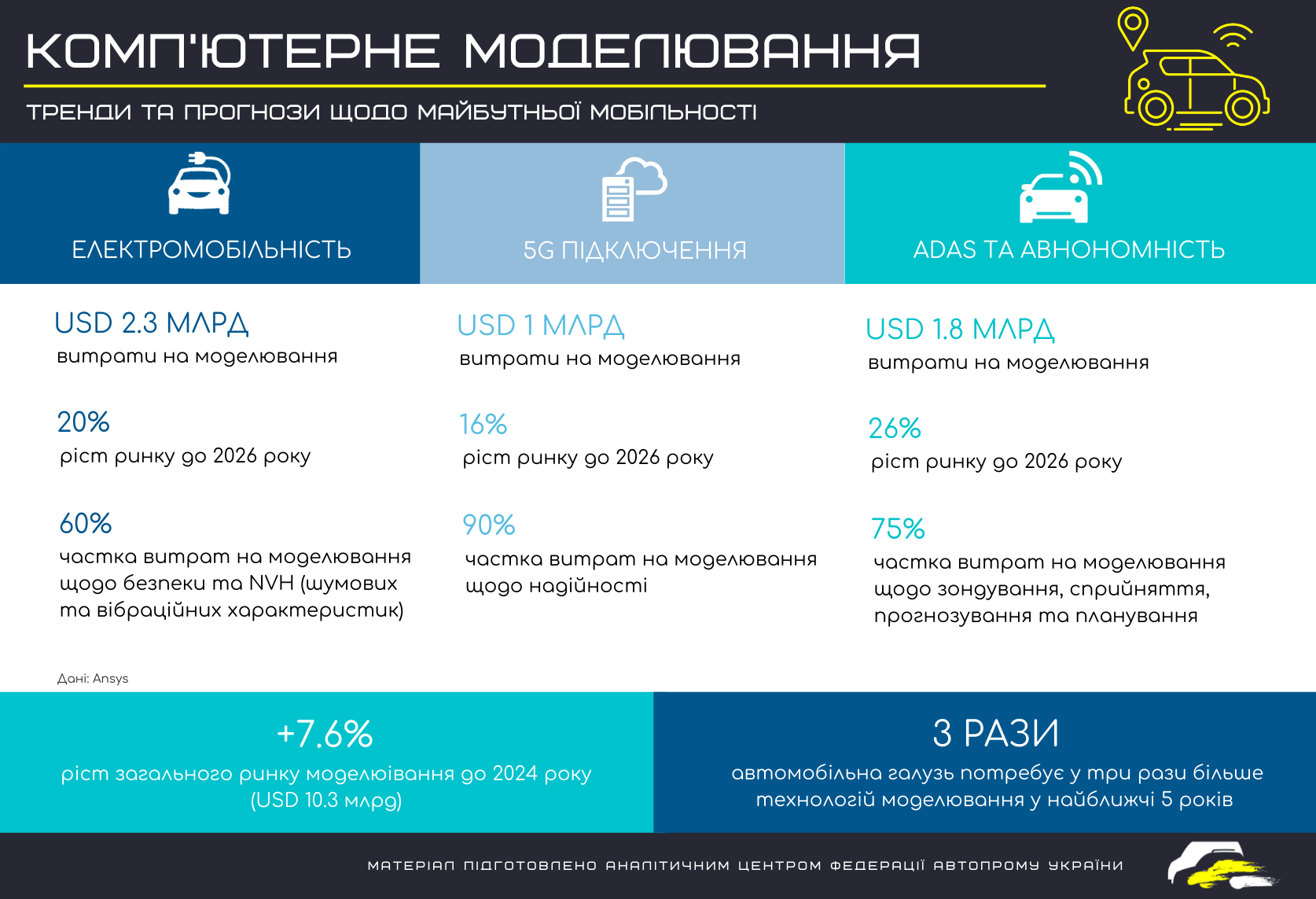
Але є ще один спосіб вдосконалити технології безпілотного водіння – це комп’ютерне моделювання. Віртуальне тестування алгоритмів керування дозволить виробникам упевнитися, що їх продукт готовий до виходу на дороги. Зараз ринок моделювання в автопромі швидко розвивається. Говорячи про автономне водіння та ADAS, глобальні витрати на моделювання вже склали USD 1,8 млрд, і цей ринок продовжить зростання – на 26% до 2026 року.
ЯК МРІЇ СТАЮТЬ РЕАЛЬНІСТЮ
Ще у 1918 році в одному журналі з’явилася ілюстрація трамваю без водія і з підписом: «Мрія автомобіліста – автомобіль, який управляється набором кнопок». А у статті говорилося, що «...в майбутньому автомобіль з рульовим колесом застаріє так само, як сьогодні застарів автомобіль з ручним насосом для газу або масла!».
Що ж, через століття фантазії щодо автономного водіння почали втілюватися у життя. На загальнодоступних дорогах Китаю та в штаті Каліфорнія (США) вже проходять тестування повністю безпілотні автомобілі без водія в салоні. З наступного року вони з’являться і в Німеччині.
І насправді усі ці проблеми зі злиттям сенсорів, кібербезпекою тощо – це лише тимчасові перепони на шляху до створення повністю автономного автомобіля. Можна сказати, що головною проблемою технологій безпілотного водіння залишається несприйняття їх корисності самими користувачами. Наприклад, до 70% власників автомобілів з АСС системою (Adaptive Cruise Control) не користуються нею або навіть не розуміють, що це таке. Тож щоб автономні автомобілі і справді стали реальністю, необхідно підвищувати рівень довіри та рівень обізнаності щодо технологій безпілотного водіння.