Знаете ли вы, что разработки технологий автономного вождения начались еще полвека назад? В 1968 году был создан мобильный робот Shakey, который воспринимал мир через встроенную камеру. А первый автоматизированный автомобиль с восприятием окружающей среды был разработан в 1977 году в лаборатории машиностроения Университета Цукуба.
Прошло уже более 50 лет, и только сейчас можно говорить о реальных перспективах таких разработок. Прогресс бесспорно есть, но очевидно - этого недостаточно. Почему же тогда технологии автономного вождения развиваются так медленно?
На днях прошел интересный вебинар «Autonomous Vehicles Online», который как раз и очертил текущее состояние отрасли и те вызовы, которые стоят перед компаниями-разработчиками автономного транспорта. Своими знаниями и опытом делились представители Volvo Car Corporation, General Motors Research, Geely, Daimler Trucks, Ford Motor Company, LeddarTech, Ansys.
Поэтому возвращаясь к вопросу о недостаточной скорости разработок беспилотных автомобилей - пока существует три комплексные проблемы, требующие решения.
Собственно, камнем преткновения остается задача научить автомобиль правильно воспринимать окружающий мир. И здесь кроется несколько подводных камней.
ТРИ ТИПА «ГЛАЗ» ДЛЯ АВТОНОМНОГО АВТОМОБИЛЯ
Автономным автомобилям требуются специальные сенсоры, такие как камеры, радар или лидар, чтобы «видеть» окружающий мир.
Камеры дешевые и надежные, их можно использовать для осмотра на 360 градусов. Но, как и наши глаза, камеры могут плохо видеть ночью или в плохих погодных условиях. Что важно - они также не дают точной информации о расстоянии. Хотя компьютеры могут решить эту проблему за счет вычислений на базе тех данных, которые дают камеры, - это может занять некоторое время, а потому не может быть надежным способом для беспилотного вождения.
Чтобы обойти этот недостаток, можно использовать радар - высокоточный способ измерения расстояния и скорости движения твердых объектов, таких как автомобили. Его сенсоры дешевые, надежные и уже имеют решающее значение для таких систем, как автоматический круиз-контроль и автономное экстренное торможение. Радар хорошо работает ночью и надежный в большинстве погодных условий. Но и в радара есть свои недостатки - его сенсоры имеют ограниченное поле зрения, и их разрешение гораздо ниже, чем у камеры.
Оба недостатки можно устранить с помощью лидара. Он работает подобно радара, но использует невидимой лазерный свет, а не радиоволны. Лидар может составить очень подробную и очень точную карту окружающей среды для автомобиля, но на технологию сильно влияет погода. Кроме того, такие сенсоры дорогие и довольно хрупкие, хотя твердотельный лидар следующего поколения обещает это исправить.
КАК НАУЧИТЬ АВТОМОБИЛЬ «ВИДЕТЬ»?
Как видим, три основные технологии сенсоров (камеры, радар, лидар) имеют свои сильные и слабые стороны, и ни одна из них не дает полных и надежных данных, необходимых для автономного управления.
Чтобы исправить это, автономные автомобили используют несколько типов сенсоров, которые распознают данные в режиме реального времени с помощью мощных современных систем искусственного интеллекта.
Сенсоры расположены так, что поля их зрения перекрываются, создавая «изображение» одной и той же области с помощью различных техник. Это позволяет сравнить данные с нескольких сенсоров, чтобы исключить ложные показатели и получить результат, который соответствует действительности.
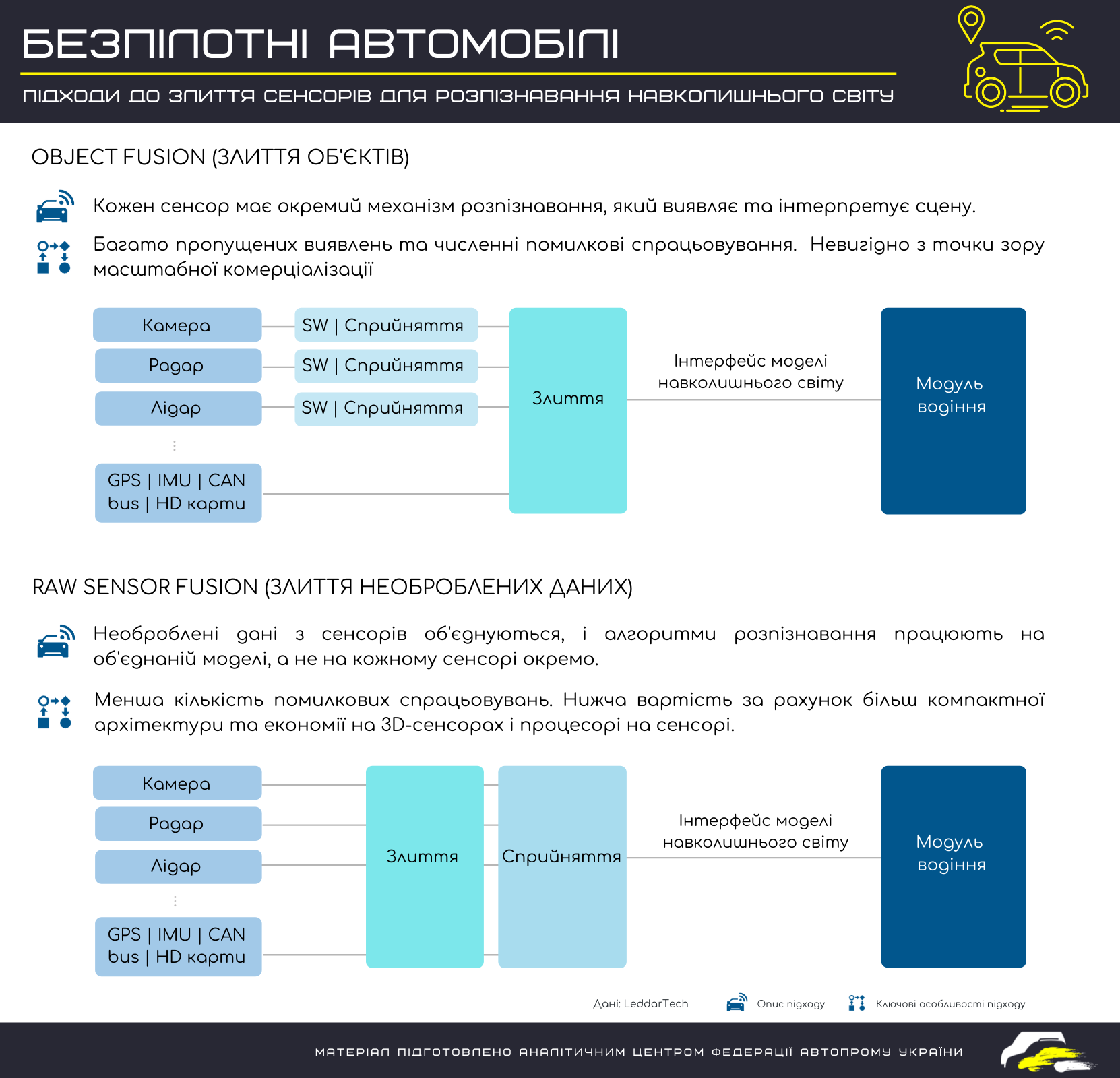
Но как достичь эффективного «слияния сенсоров» - синхронизации данных со всех типов сенсоров?
У разработчиков есть два основных подхода:
АВТОМОБИЛЬ ТОЖЕ МОГУТ «ХАКНУТЬ»?
Все эти данные, генерируемые автомобилями с технологиями автономного вождения, становятся одновременно драйвером и сдерживающим фактором для автомобильной промышленности. Уже сегодня, по информации McKinsey, подключенный к сети автомобиль обрабатывает до 25Гб данных в час. А дальше будет только больше.
Другими словами - автомобиль становится дата-центром на колесах. И понятно, что при таких условиях важную роль играет надлежащую защиту данных. С 2010 года было около 700 сообщений об автомобильных кибер-атаки (и это только обнародованные данные). При этом только за прошлый год таких случаев стало в 4 раза больше по сравнению с 2019 годом.
Огромное значение кибербезопасности и адекватного распознавания окружающей среды становится еще более очевидным, учитывая реальную угрозу манипуляций данными. В частности, так называемые «спорные изображения» (adversarial images) заставляют систему видеть не то, что есть. Даже мелкие изменения изображения могут привести к различным интерпретациям ситуации. Например, если наклеить черные полосы-стикеры на знак «Стоп», система беспилотного вождения может воспринять это как знак ограничения скорости 45 км / ч.
Еще один пример - фантомные изображения (depthless objects), когда система видит то, чего на самом деле нет. Исследователи обнаружили, что существующие системы автопилотов можно обмануть, показав им изображения людей, автомобилей и других препятствий, спроектированные дронами или другими носителями проекторов, на дороге или на окружающих билбордах. Злоумышленники могли бы потенциально использовать эту схему, чтобы запустить систему торможения или направить автомобиль на встречную полосу.
Как этому помешать? Совершенствовать алгоритмы распознавания и развивать машинное обучение. Именно поэтому автономные автомобили тестируются на дорогах общего пользования. Собирая данные из реальных ситуаций вождения и обучая автомобиль правильно реагировать, разработчики могут создавать эффективные алгоритмы вождения и продолжать тестировать и совершенствовать их в реальном мире.
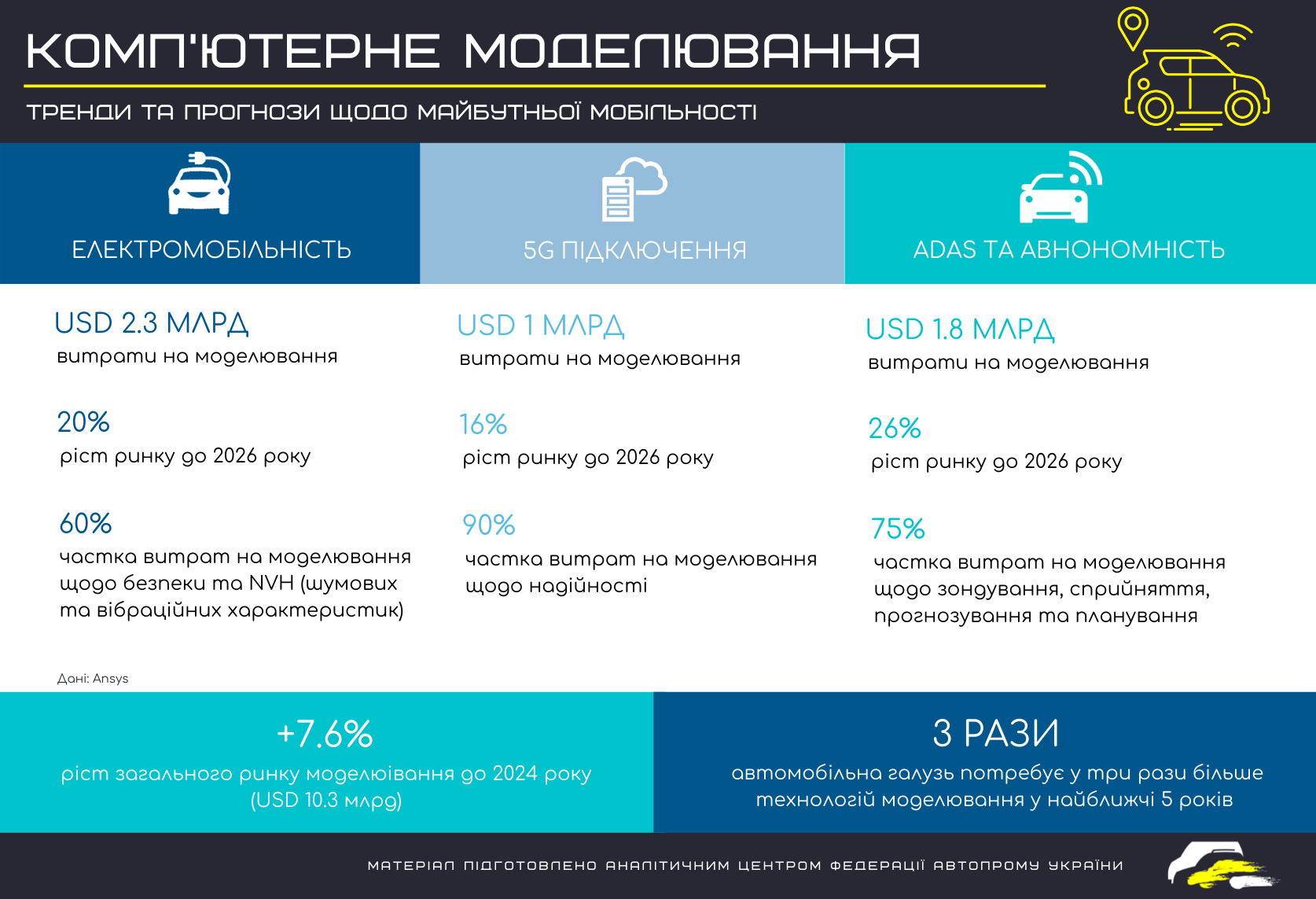
Но есть еще один способ усовершенствовать технологии беспилотного вождения - это компьютерное моделирование. Виртуальное тестирование алгоритмов управления позволит производителям удостовериться, что их продукт готов к выходу на дороги. Сейчас рынок моделирования в автопроме быстро развивается. Говоря об автономном вождения и ADAS, глобальные расходы на моделирование уже составили USD 1,8 млрд, и этот рынок продолжит рост - на 26% до 2026 года.
КАК МЕЧТЫ СТАНОВЯТСЯ РЕАЛЬНОСТЬЮ
Еще в 1918 году в одном журнале появилась иллюстрация трамвая без водителя и с подписью: «Мечта автомобилиста - автомобиль, который управляется набором кнопок». А в статье говорилось, что «... в будущем автомобиль с рулевым колесом устареет так же, как сегодня устарел автомобиль с ручным насосом для газа или масла!».
Что ж, через века фантазии по автономного вождения начали воплощаться в жизнь. На общедоступных дорогах Китая и в штате Калифорния (США) уже проходят тестирование полностью беспилотные автомобили без водителя в салоне. Со следующего года они появятся и в Германии.
И на самом деле все эти проблемы со слиянием сенсоров, кибербезопасностью т.д. - это лишь временные преграды на пути к созданию полностью автономного автомобиля. Можно сказать, что главной проблемой технологий беспилотного вождения остается неприятие их полезности самими пользователями. Например, до 70% владельцев автомобилей АСС системой (Adaptive Cruise Control) не пользуются ею или даже не понимают, что это такое. Поэтому чтобы автономные автомобили действительно стали реальностью, необходимо повышать уровень доверия и уровень осведомленности относительно технологий беспилотного вождения.